lietuvių



Trisection, ketvirčio apsikeitimo funkcija (vienas blokas gali realizuoti dvi funkcijas).
Vienkartinis suspaudimas gali užbaigti kelių darbinių paviršių apdorojimą, o tai gali tiesiogiai pagerinti apdorojimo efektyvumą 6–10 kartų.
Didelis padėties nustatymo tikslumas ir pakartotinis padėties nustatymo tikslumas.
Ilgalaikės vidaus institucijų tepimo charakteristikos užtikrina patikimą indeksavimo veikimą ir apsaugos nuo užstrigimo sistemą.
Valdymas yra nuolatinis ir automatinis, o apdorojimas yra labai saugus.
Ruošinio prispaudimas yra didelis greitis ir tvirtumas, todėl galima pjauti didelį kiekį.
Išcentrinė jėgos kompensavimo sistema (patvirtinkite užsakydami).
Padėties indeksavimas į lygio stebėjimo sistemą (patvirtinti užsakant).
Po grūdinimo ir šlifavimo atsparumo deformacijai konstrukcija gali veiksmingai užtikrinti standumą ir tikslumą.
Veleno sukimosi procese gali atlikti indeksavimo operaciją, leidžiama greitai konvertuoti kelis darbinius velenus.
Indeksavimo ir laikymo mechanizmas yra nepertraukiamas alyvos tepimas ir palaikomas tvirtų importuojamų guolių.
Norint pasiekti didesnį gamybos efektyvumą, išcentrinės jėgos kompensavimo sistema naudojama esant dideliam ribiniam greičiui.
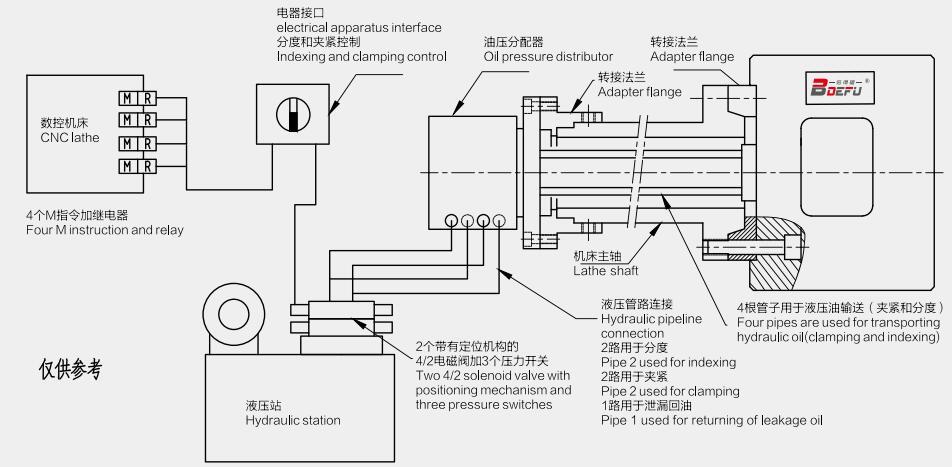
Hidraulinė sistema yra labai paprasta, turinti tik keturis alyvos vamzdžius, iš kurių du naudojami indeksavimo mechanizmui ir du laikymo mechanizmui.
Naudodami tekinimo staklių CNC sistemą arba nepriklausomą elektrinio aparato sąsają, nuolat automatiškai valdykite ruošinio apdorojimo padėtį ir kitus parametrus.
Vidinis mechanizmas yra visiškai sandarus, kad teršalai nepatektų į pjovimo skystį, atliekas ir dulkes.



Galima pasiekti 4x90°, 8x45°, 3x120°, 6x60° indeksavimo kampą ir specialų kampą.
| Pritemdymas/Spec | KFD-168 | KFD-210 | KFD-235 | KFD-250 | KFD-280 | KFD-315 | KFD-360 | KFD-400 | KFD-460 | KFD-570 | KFD-680 | ||
| A | mm | 172 | 215 | 235 | 254 | 275 | 315 | 360 | 400 | 460 | 570 | 680 | |
| B | mm | 140 | 170 | 170 | 220 | 220 | 220 | 220 | 300 | 300 | 380 | 380 | |
| C | mm | 104.8 | 133.4 | 133.4 | 171.4 | 171.4 | 171.4 | 171.4 | 235 | 235 | 330.2 | 330.2 | |
| D | mm | 11 | 13 | 13 | 17 | 17 | 17 | 17 | 21 | 21 | 27 | 27 | |
| Didžiausias ašinės apkrovos langas |
G | mm | 125 | 175 | 197 | 216 | 239 | 261 | 301 | 333 | 395 | 466 | 576 |
| H | mm | 152 | 180 | 190 | 210 | 218 | 235 | 260 | 291 | 321 | 435 | 485 | |
| aš | mm | 2 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 5 | 5 | |
| P | mm | 30 | 35 | 35 | 44 | 45 | 50 | 50 | 58 | 58 | 85 | 85 | |
| K | mm | 46 | 95 | 102 | 112 | 125 | 136 | 150 | 170 | 200 | 270 | 320 | |
| R | mm | 33 | 48 | 40 | 46 | 58 | 82 | 100 | 110 | 140 | 180 | 235 | |
| T | mm | 33 | 36 | 53 | 56 | 70 | 66 | 88 | 91 | 121 | 150 | 205 | |
| Žandikaulio insultas | U | mm | 9 | 15 | 15 | 17 | 17 | 23 | 23 | 30 | 30 | 40 | 40 |
| V | mm | M8 | M8 | M8 | M8 | M8 | M10 | M10 | M10 | M10 | M10 | M10 | |
| W | mm | 18 | 20 | 25 | 25 | 25 | 25 | 25 | 25 | 25 | 50 | 50 | |
| Y | mm | 5 | 6 | 8 | 10 | 12 | 12 | 12 | 12 | 12 | 18 | 18 | |
| Z | mm | 30 | 28 | 28 | 32 | 32 | 29 | 29 | 24 | 24 | 50 | 50 | |
| Stūmoklio sritis | cm2 | 13 | 30 | 30 | 43 | 43 | 63.6 | 63.6 | 86.6 | 86.6 | 113 | 113 | |
| Maksimalus slėgis | baras | 25 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | |
| Maksimalus greitis | aps./min | 3000 | 3000 | 2800 | 2500 | 2200 | 2000 | 1700 | 1200 | 1000 | 800 | 600 | |
| Sukimosi momentas | kg.m2 | 0.12 | 0.16 | 0.27 | 0.47 | 0.88 | 1.45 | 2.05 | 3.4 | 6.4 | 12 | 29 | |
| Suspaudimo žandikaulio svoris | kg | 0.5 | 0.6 | 0.6 | 1.3 | 1.3 | 2 | 2 | 4 | 5 | 6 | 7 | |
| Kūno svoris | kg | 18 | 24 | 32 | 42 | 52 | 80 | 95 | 128 | 170 | 285 | 490 | |
*Pastaba:
Tik esant maksimaliam slėgiui, didžiausią greitį galima pasiekti naudojant žandikaulį, kurio svoris ne didesnis nei nurodyta aukščiau esančioje lentelėje.
Apdoroti ruošiniai ir du žandikauliai turi būti gerai subalansuoti, sukdami ašį. Jei šios sąlygos nesilaikoma arba žandikaulis turi antsvorį, greitį reikia sumažinti.
Ruošinys gali indeksuoti, kai velenas sukasi. Kai ruošinys dirba dideliu greičiu, kad būtų išvengta vibracijos dėl ruošinio svorio disbalanso vidurinėje padėtyje, greitį siūloma sumažinti 30-50%.




























































