اردو



ٹرائی سیکشن، کوارٹرنگ سویپ فنکشن (ایک یونٹ دو افعال کو محسوس کر سکتا ہے)۔
ون ٹائم کلیمپنگ کئی کام کرنے والے چہروں کی پروسیسنگ مکمل کر سکتی ہے، جو براہ راست پروسیسنگ کی کارکردگی کو 6-10 گنا بہتر بنا سکتی ہے۔
اعلی پوزیشننگ کی صحت سے متعلق اور بار بار پوزیشننگ کی صحت سے متعلق۔
اندرونی اداروں کی طویل مدتی چکنا کرنے کی خصوصیات قابل اعتماد اشاریہ سازی کی کارکردگی اور اینٹی جیمنگ سسٹم کو یقینی بناتی ہیں۔
کنٹرول مسلسل اور خودکار ہے، اور پروسیسنگ بہت محفوظ ہے۔
ورک پیس کا کلیمپنگ تیز رفتار اور سختی کا ہے، اور بڑی مقدار میں کاٹنے کی اجازت دیتا ہے۔
سینٹرفیوگل فورس معاوضہ کا نظام (حکم دیتے وقت تصدیق کریں)۔
سطح کی نگرانی کے نظام کے لیے انڈیکسنگ پوزیشن (آرڈر دیتے وقت تصدیق کریں)۔
بجھانے اور پیسنے کے بعد، اخترتی مزاحمت کا ڈیزائن مؤثر طریقے سے سختی اور درستگی کو یقینی بنا سکتا ہے۔
شافٹ سپنڈلنگ کے عمل میں، انڈیکسنگ آپریشن کر سکتے ہیں، اور کئی ورکنگ شافٹ کی تیز رفتار تبدیلی کی اجازت ہے۔
انڈیکسنگ اور ہولڈنگ میکانزم بلاتعطل تیل چکنا کرنے کا ہے، اور اسے مضبوط درآمدی بیرنگ سے سپورٹ کیا جاتا ہے۔
اعلی پیداواری کارکردگی کو حاصل کرنے کے لیے، سینٹرفیوگل فورس کے معاوضے کا نظام اعلی حد رفتار کے تحت اپنایا جاتا ہے۔
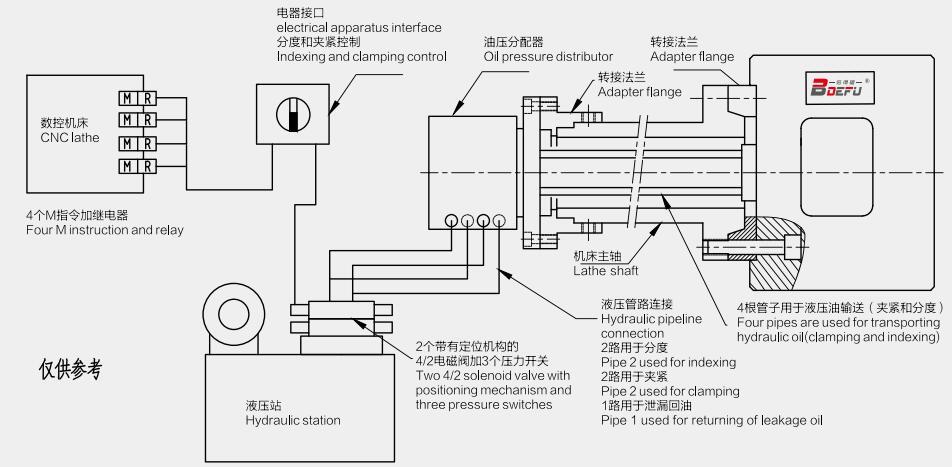
صرف چار آئل پائپوں کے ساتھ ہائیڈرولک نظام بہت آسان ہے، جن میں سے دو انڈیکسنگ میکانزم کے لیے اور دو ہولڈنگ میکانزم کے لیے استعمال ہوتے ہیں۔
لیتھ سی این سی سسٹم یا آزاد الیکٹریکل اپریٹس انٹرفیس کے ذریعے، ورک پیس کی پروسیسنگ پوزیشن اور دیگر پیرامیٹرز کو مسلسل خود بخود کنٹرول کریں۔
اندرونی میکانزم کو مکمل طور پر سیل کر دیا گیا ہے تاکہ آلودگی کو کاٹنے والے سیال، فضلہ اور دھول میں داخل ہونے سے مکمل طور پر روکا جا سکے۔



4x90°,8X45°,3x120°,6x60° اور خصوصی زاویہ کا انڈیکسنگ زاویہ حاصل کر سکتے ہیں۔
| مدھم/خصوصی | KFD-168 | KFD-210 | KFD-235 | KFD-250 | KFD-280 | KFD-315 | KFD-360 | KFD-400 | KFD-460 | KFD-570 | KFD-680 | ||
| اے | ملی میٹر | 172 | 215 | 235 | 254 | 275 | 315 | 360 | 400 | 460 | 570 | 680 | |
| بی | ملی میٹر | 140 | 170 | 170 | 220 | 220 | 220 | 220 | 300 | 300 | 380 | 380 | |
| سی | ملی میٹر | 104.8 | 133.4 | 133.4 | 171.4 | 171.4 | 171.4 | 171.4 | 235 | 235 | 330.2 | 330.2 | |
| ڈی | ملی میٹر | 11 | 13 | 13 | 17 | 17 | 17 | 17 | 21 | 21 | 27 | 27 | |
| زیادہ سے زیادہ محوری لوڈنگ ونڈو |
جی | ملی میٹر | 125 | 175 | 197 | 216 | 239 | 261 | 301 | 333 | 395 | 466 | 576 |
| ایچ | ملی میٹر | 152 | 180 | 190 | 210 | 218 | 235 | 260 | 291 | 321 | 435 | 485 | |
| میں | ملی میٹر | 2 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 5 | 5 | |
| پی | ملی میٹر | 30 | 35 | 35 | 44 | 45 | 50 | 50 | 58 | 58 | 85 | 85 | |
| سوال | ملی میٹر | 46 | 95 | 102 | 112 | 125 | 136 | 150 | 170 | 200 | 270 | 320 | |
| آر | ملی میٹر | 33 | 48 | 40 | 46 | 58 | 82 | 100 | 110 | 140 | 180 | 235 | |
| ٹی | ملی میٹر | 33 | 36 | 53 | 56 | 70 | 66 | 88 | 91 | 121 | 150 | 205 | |
| جبڑے کا اسٹروک | یو | ملی میٹر | 9 | 15 | 15 | 17 | 17 | 23 | 23 | 30 | 30 | 40 | 40 |
| وی | ملی میٹر | M8 | M8 | M8 | M8 | M8 | ایم 10 | ایم 10 | ایم 10 | ایم 10 | ایم 10 | ایم 10 | |
| ڈبلیو | ملی میٹر | 18 | 20 | 25 | 25 | 25 | 25 | 25 | 25 | 25 | 50 | 50 | |
| Y | ملی میٹر | 5 | 6 | 8 | 10 | 12 | 12 | 12 | 12 | 12 | 18 | 18 | |
| Z | ملی میٹر | 30 | 28 | 28 | 32 | 32 | 29 | 29 | 24 | 24 | 50 | 50 | |
| پسٹن کا علاقہ | سینٹی میٹر2 | 13 | 30 | 30 | 43 | 43 | 63.6 | 63.6 | 86.6 | 86.6 | 113 | 113 | |
| زیادہ سے زیادہ دباؤ | بار | 25 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | |
| زیادہ سے زیادہ رفتار | آر پی ایم | 3000 | 3000 | 2800 | 2500 | 2200 | 2000 | 1700 | 1200 | 1000 | 800 | 600 | |
| گھومنے والا لمحہ | کلو گرام2 | 0.12 | 0.16 | 0.27 | 0.47 | 0.88 | 1.45 | 2.05 | 3.4 | 6.4 | 12 | 29 | |
| کلیمپنگ جبڑے کا وزن | کلو | 0.5 | 0.6 | 0.6 | 1.3 | 1.3 | 2 | 2 | 4 | 5 | 6 | 7 | |
| جسمانی وزن | کلو | 18 | 24 | 32 | 42 | 52 | 80 | 95 | 128 | 170 | 285 | 490 | |
*نوٹ:
صرف زیادہ سے زیادہ دباؤ میں، اوپر والے جدول میں دکھائے گئے وزن سے زیادہ کے جبڑے کا استعمال کرتے ہوئے سب سے زیادہ رفتار حاصل کی جا سکتی ہے۔
پروسیس شدہ ورک پیس اور دو جبڑے محور کو گھومتے ہوئے اچھی طرح سے متوازن ہونے چاہئیں۔ اگر اس شرط کو پورا نہیں کرتے، یا جبڑے کا وزن زیادہ ہے، تو رفتار کو کم کرنا ضروری ہے۔
جب شافٹ گھوم رہا ہے تو ورک پیس انڈیکس کرسکتا ہے۔ جب workpiece تیز رفتار پر، درمیانی پوزیشن میں workpiece کے وزن میں عدم توازن کے نتیجے میں کمپن سے بچنے کے لئے، رفتار کو 30-50٪ کم کرنے کی تجویز ہے.




























































