नेपाली



ट्राइसेक्शन, क्वार्टरिङ स्वैप प्रकार्य (एउटा इकाईले दुई कार्यहरू महसुस गर्न सक्छ)।
एक-पटक क्ल्याम्पिङले धेरै काम गर्ने अनुहारहरूको प्रशोधन पूरा गर्न सक्छ, जसले सीधा 6-10 पटक प्रशोधन दक्षता सुधार गर्न सक्छ।
उच्च स्थिति सटीक र दोहोर्याइएको स्थिति सटीक।
आन्तरिक संस्थाहरूको दीर्घकालीन स्नेहन विशेषताहरूले विश्वसनीय अनुक्रमणिका प्रदर्शन र एन्टी-जामिङ प्रणाली सुनिश्चित गर्दछ।
नियन्त्रण निरन्तर र स्वचालित छ, र प्रशोधन धेरै सुरक्षित छ।
workpiece को clamping उच्च गति र कठोरता को छ, र ठूलो काटन मात्रा अनुमति दिन्छ।
केन्द्रापसारक बल क्षतिपूर्ति प्रणाली (अर्डर गर्दा पुष्टि गर्नुहोस्)।
स्तर अनुगमन प्रणालीमा अनुक्रमणिका स्थिति (अर्डर गर्दा पुष्टि गर्नुहोस्)।
शमन र पीस पछि, विरूपण प्रतिरोधको डिजाइनले प्रभावकारी रूपमा कठोरता र सटीकता सुनिश्चित गर्न सक्छ।
शाफ्ट स्पिन्डलिंगको प्रक्रियामा, अनुक्रमणिका सञ्चालन गर्न सक्छ, र धेरै काम गर्ने शाफ्टको द्रुत रूपान्तरणलाई अनुमति छ।
अनुक्रमणिका र होल्डिङ मेकानिजम निर्बाध तेल स्नेहन को हो, र बलियो आयात बियरिंग द्वारा समर्थित छ।
उच्च उत्पादन दक्षता हासिल गर्न, केन्द्रापसारक बल क्षतिपूर्ति प्रणाली उच्च सीमा गति अन्तर्गत अपनाइन्छ।
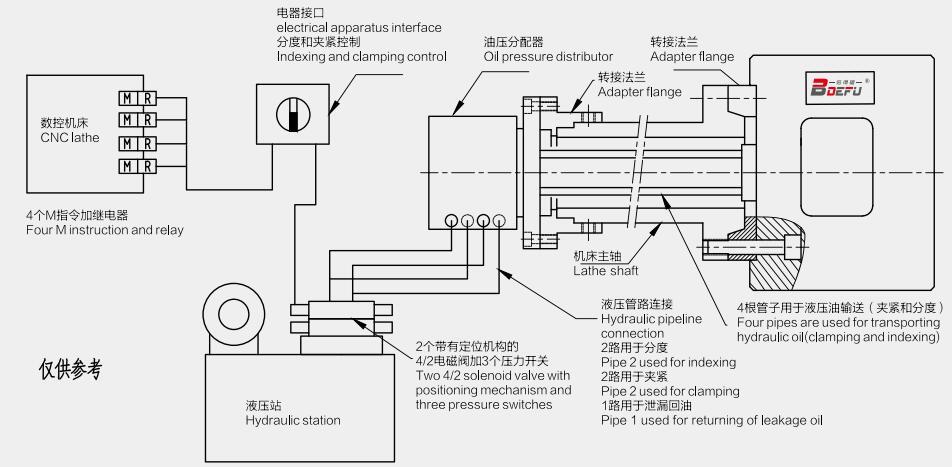
हाइड्रोलिक प्रणाली धेरै सरल छ जसमा चारवटा तेल पाइपहरू मात्र छन्, जसमध्ये दुईवटा इन्डेक्सिङ मेकानिजमका लागि र दुईवटा होल्डिङ मेकानिजमका लागि प्रयोग गरिन्छ।
खराद CNC प्रणाली वा स्वतन्त्र विद्युत उपकरण इन्टरफेस मार्फत, workpiece को प्रशोधन स्थिति र अन्य प्यारामिटरहरू लगातार स्वचालित रूपमा नियन्त्रण गर्नुहोस्।
प्रदूषकहरूलाई काट्ने तरल पदार्थ, फोहोर र धूलो भित्र पस्नबाट रोक्नको लागि आन्तरिक संयन्त्र पूर्ण रूपमा सिल गरिएको छ।



4x90°,8X45°,3x120°,6x60° र विशेष कोणको अनुक्रमणिका कोण प्राप्त गर्न सक्छ।
| मन्द/विशिष्ट | KFD-168 | KFD-210 | KFD-235 | KFD-250 | KFD-280 | KFD-315 | KFD-360 | KFD-400 | KFD-460 | KFD-570 | KFD-680 | ||
| ए | mm | 172 | 215 | 235 | 254 | 275 | 315 | 360 | 400 | 460 | 570 | 680 | |
| बि | mm | 140 | 170 | 170 | 220 | 220 | 220 | 220 | 300 | 300 | 380 | 380 | |
| सी | mm | 104.8 | 133.4 | 133.4 | 171.4 | 171.4 | 171.4 | 171.4 | 235 | 235 | 330.2 | 330.2 | |
| D | mm | 11 | 13 | 13 | 17 | 17 | 17 | 17 | 21 | 21 | 27 | 27 | |
| अधिकतम अक्षीय लोडिङ विन्डो |
G | mm | 125 | 175 | 197 | 216 | 239 | 261 | 301 | 333 | 395 | 466 | 576 |
| एच | mm | 152 | 180 | 190 | 210 | 218 | 235 | 260 | 291 | 321 | 435 | 485 | |
| म | mm | 2 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 5 | 5 | |
| P | mm | 30 | 35 | 35 | 44 | 45 | 50 | 50 | 58 | 58 | 85 | 85 | |
| प्र | mm | 46 | 95 | 102 | 112 | 125 | 136 | 150 | 170 | 200 | 270 | 320 | |
| आर | mm | 33 | 48 | 40 | 46 | 58 | 82 | 100 | 110 | 140 | 180 | 235 | |
| T | mm | 33 | 36 | 53 | 56 | 70 | 66 | 88 | 91 | 121 | 150 | 205 | |
| जबा स्ट्रोक | U | mm | 9 | 15 | 15 | 17 | 17 | 23 | 23 | 30 | 30 | 40 | 40 |
| वि | mm | M8 | M8 | M8 | M8 | M8 | M10 | M10 | M10 | M10 | M10 | M10 | |
| डब्लु | mm | 18 | 20 | 25 | 25 | 25 | 25 | 25 | 25 | 25 | 50 | 50 | |
| वाई | mm | 5 | 6 | 8 | 10 | 12 | 12 | 12 | 12 | 12 | 18 | 18 | |
| Z | mm | 30 | 28 | 28 | 32 | 32 | 29 | 29 | 24 | 24 | 50 | 50 | |
| पिस्टन क्षेत्र | सेमी2 | 13 | 30 | 30 | 43 | 43 | 63.6 | 63.6 | 86.6 | 86.6 | 113 | 113 | |
| अधिकतम दबाव | बार | 25 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | |
| अधिकतम गति | आरपीएम | 3000 | 3000 | 2800 | 2500 | 2200 | 2000 | 1700 | 1200 | 1000 | 800 | 600 | |
| घुम्ने पल | kg.m2 | 0.12 | 0.16 | 0.27 | 0.47 | 0.88 | 1.45 | 2.05 | 3.4 | 6.4 | 12 | 29 | |
| क्ल्याम्पिंग जबडाको वजन | kg | 0.5 | 0.6 | 0.6 | 1.3 | 1.3 | 2 | 2 | 4 | 5 | 6 | 7 | |
| शरीरको वजन | kg | 18 | 24 | 32 | 42 | 52 | 80 | 95 | 128 | 170 | 285 | 490 | |
*नोट:
केवल अधिकतम दबावमा, माथिको तालिकामा देखाइएको तौल भन्दा बढी नभएको जबडा प्रयोग गर्दा उच्चतम गति प्राप्त गर्न सकिन्छ।
प्रशोधित वर्कपीस र दुई बङ्गारा राम्रोसँग सन्तुलित हुनुपर्छ। यदि यो अवस्था पूरा गर्दैन भने, वा बङ्गारा अधिक वजन छ, गति कम गर्नुपर्छ।
शाफ्ट घुमिरहेको बेला workpiece अनुक्रमणिका गर्न सक्नुहुन्छ। जब उच्च गतिमा workpiece, मध्य स्थिति मा workpiece 'वजन असन्तुलन को परिणाम को रूप मा कम्पन जोगिन, गति 30-50% कम गर्न प्रस्ताव गरिएको छ।






























































