हिन्दी



ट्राइसेक्शन, क्वार्टरिंग स्वैप फ़ंक्शन (एक इकाई दो कार्यों का एहसास कर सकती है)।
एक बार की क्लैंपिंग कई कामकाजी चेहरों की प्रोसेसिंग को पूरा कर सकती है, जिससे प्रोसेसिंग दक्षता में सीधे 6-10 गुना सुधार हो सकता है।
उच्च स्थिति निर्धारण परिशुद्धता और बार-बार स्थिति निर्धारण परिशुद्धता।
आंतरिक संस्थानों की दीर्घकालिक स्नेहन विशेषताएँ विश्वसनीय अनुक्रमण प्रदर्शन और एंटी-जैमिंग प्रणाली सुनिश्चित करती हैं।
नियंत्रण निरंतर और स्वचालित है, और प्रसंस्करण बहुत सुरक्षित है।
वर्कपीस की क्लैम्पिंग उच्च गति और कठोरता की है, और बड़ी मात्रा में काटने की अनुमति देती है।
केन्द्रापसारक बल क्षतिपूर्ति प्रणाली (आदेश देते समय पुष्टि करें)।
लेवल मॉनिटरिंग सिस्टम में अनुक्रमण स्थिति (आदेश देते समय पुष्टि करें)।
शमन और पीसने के बाद, विरूपण प्रतिरोध का डिज़ाइन प्रभावी ढंग से कठोरता और परिशुद्धता सुनिश्चित कर सकता है।
शाफ्ट स्पिंडलिंग की प्रक्रिया में, इंडेक्सिंग ऑपरेशन को अंजाम दिया जा सकता है, और कई कामकाजी शाफ्ट के तेजी से रूपांतरण की अनुमति दी जाती है।
इंडेक्सिंग और होल्डिंग तंत्र निर्बाध तेल स्नेहन का है, और मजबूत आयात बीयरिंग द्वारा समर्थित है।
उच्च उत्पादन दक्षता प्राप्त करने के लिए, उच्च सीमा गति के तहत केन्द्रापसारक बल क्षतिपूर्ति प्रणाली को अपनाया जाता है।
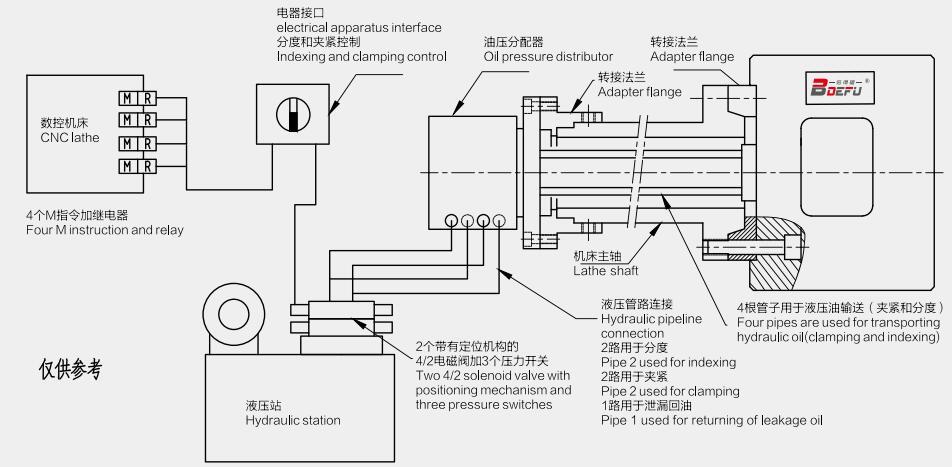
हाइड्रोलिक प्रणाली केवल चार तेल पाइपों के साथ बहुत सरल है, जिनमें से दो का उपयोग इंडेक्सिंग तंत्र के लिए और दो का उपयोग होल्डिंग तंत्र के लिए किया जाता है।
खराद सीएनसी प्रणाली या स्वतंत्र विद्युत उपकरण इंटरफ़ेस के माध्यम से, वर्कपीस की प्रसंस्करण स्थिति और अन्य मापदंडों को लगातार स्वचालित रूप से नियंत्रित करें।
प्रदूषकों को काटने वाले तरल पदार्थ, अपशिष्ट और धूल में प्रवेश करने से रोकने के लिए आंतरिक तंत्र को पूरी तरह से सील कर दिया गया है।



4x90°,8X45°,3x120°,6x60° और विशेष कोण का अनुक्रमण कोण प्राप्त कर सकते हैं।
| मंद/विशिष्ट | केएफडी-168 | केएफडी-210 | केएफडी-235 | केएफडी-250 | केएफडी-280 | केएफडी-315 | केएफडी-360 | केएफडी-400 | केएफडी-460 | केएफडी-570 | केएफडी-680 | ||
| ए | मिमी | 172 | 215 | 235 | 254 | 275 | 315 | 360 | 400 | 460 | 570 | 680 | |
| बी | मिमी | 140 | 170 | 170 | 220 | 220 | 220 | 220 | 300 | 300 | 380 | 380 | |
| सी | मिमी | 104.8 | 133.4 | 133.4 | 171.4 | 171.4 | 171.4 | 171.4 | 235 | 235 | 330.2 | 330.2 | |
| डी | मिमी | 11 | 13 | 13 | 17 | 17 | 17 | 17 | 21 | 21 | 27 | 27 | |
| अधिकतम अक्षीय लोडिंग विंडो |
जी | मिमी | 125 | 175 | 197 | 216 | 239 | 261 | 301 | 333 | 395 | 466 | 576 |
| एच | मिमी | 152 | 180 | 190 | 210 | 218 | 235 | 260 | 291 | 321 | 435 | 485 | |
| मैं | मिमी | 2 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 5 | 5 | |
| पी | मिमी | 30 | 35 | 35 | 44 | 45 | 50 | 50 | 58 | 58 | 85 | 85 | |
| क्यू | मिमी | 46 | 95 | 102 | 112 | 125 | 136 | 150 | 170 | 200 | 270 | 320 | |
| आर | मिमी | 33 | 48 | 40 | 46 | 58 | 82 | 100 | 110 | 140 | 180 | 235 | |
| टी | मिमी | 33 | 36 | 53 | 56 | 70 | 66 | 88 | 91 | 121 | 150 | 205 | |
| जबड़े का आघात | यू | मिमी | 9 | 15 | 15 | 17 | 17 | 23 | 23 | 30 | 30 | 40 | 40 |
| वी | मिमी | एम8 | एम8 | एम8 | एम8 | एम8 | एम10 | एम10 | एम10 | एम10 | एम10 | एम10 | |
| डब्ल्यू | मिमी | 18 | 20 | 25 | 25 | 25 | 25 | 25 | 25 | 25 | 50 | 50 | |
| वाई | मिमी | 5 | 6 | 8 | 10 | 12 | 12 | 12 | 12 | 12 | 18 | 18 | |
| जेड | मिमी | 30 | 28 | 28 | 32 | 32 | 29 | 29 | 24 | 24 | 50 | 50 | |
| पिस्टन क्षेत्र | सेमी2 | 13 | 30 | 30 | 43 | 43 | 63.6 | 63.6 | 86.6 | 86.6 | 113 | 113 | |
| अधिकतम दबाव | छड़ | 25 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | 35 | |
| अधिकतम गति | आरपीएम | 3000 | 3000 | 2800 | 2500 | 2200 | 2000 | 1700 | 1200 | 1000 | 800 | 600 | |
| घूमता हुआ क्षण | किग्रा.एम2 | 0.12 | 0.16 | 0.27 | 0.47 | 0.88 | 1.45 | 2.05 | 3.4 | 6.4 | 12 | 29 | |
| क्लैंपिंग जबड़े का वजन | किग्रा | 0.5 | 0.6 | 0.6 | 1.3 | 1.3 | 2 | 2 | 4 | 5 | 6 | 7 | |
| शरीर का वजन | किग्रा | 18 | 24 | 32 | 42 | 52 | 80 | 95 | 128 | 170 | 285 | 490 | |
*टिप्पणी:
केवल अधिकतम दबाव में, उपरोक्त तालिका में दिखाए गए वजन से अधिक के जबड़े का उपयोग करते समय उच्चतम गति प्राप्त की जा सकती है।
संसाधित वर्कपीस और दो जबड़ों को धुरी पर अच्छी तरह से संतुलित घूमना चाहिए। यदि इस शर्त को पूरा नहीं करते हैं, या जबड़े का वजन अधिक है, तो गति कम करनी होगी।
जब शाफ्ट घूम रहा हो तो वर्कपीस इंडेक्स कर सकता है। जब वर्कपीस उच्च गति पर हो, तो मध्य स्थिति में वर्कपीस के वजन के असंतुलन के परिणामस्वरूप कंपन से बचने के लिए, गति को 30-50% कम करने का प्रस्ताव है।




























































